Co-op ‘escape’ game
We Were Here Together (2019)
")
Co-op ‘escape’ game

The Scouting Game Camp application is a short interactive level select screen. It was part of a themed activity week for children.

Chalk Gardens is a fantasy exploration game about coping by changing your mindset. It is my graduation project.


Around the Creek is a storydriven game in which you get to know and love weird characters while making difficult (moral) choices in order to solve an exciting mystery


+- 4 minutes per try

Oh this is awesome!
Internet of Elephants just released two pages about game prototypes I worked on during my internship at Little Chicken. Go check it out!
https://www.internetofelephants.com/safari-central/
Internet of Elephants is trying to preserve wildlife by engaging an audience through games using real-world data. During my internship I worked on prototypes that explored some of the ways you can create games or playful apps using wildlife and wildlife data.
Niels de Jong – Programmer (intern)
Ramses di Perna – Programmer (intern)
Daan Ruiter – Programmer (intern)
Linda Kentie – Artist
Lianne Alink – Product Owner
Joris van Leeuwen – SCRUM master

In Unity you’ll want to change the transforms of your objectinstances quite often. The transform of an object determines its position, rotation and scale (size) in the world. If you want to do anything beyond changing textures on a static scene, there is no way around manipulating the transform. Now, this is hardly a problem when translating (changing the position), or scaling (changing an object’s size).
When rotating however, this becomes a problem when you manipulate eulerangles, the easiest way to understand rotations. You’ll have to deal with Gimbal Lock. (a phenomenon that makes small, incremental changes to rotations makes them go haywire when over a certain point) To prevent this, Unity internally represents rotations as Quaternions. But what are Quaternions?
In this selftuition, I will try to clear both my own confusion about Rotations as well as any confusion readers might have. I will focus only on 3D.
Please download the full tutorial including all sources:
Gimbal lock is what happens when two of the axes align. (See the screenshot below)
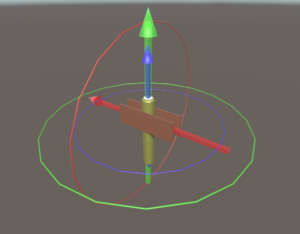
Here, the Y-axis and the Z-axis are aligned. This happened by simply rotating the (red) X-axis 90 degrees. We now have a situation in which rotating around the Z-axis and rotating around the Y-axis have the exact same result. That means we’ve lost the possibility to rotate in three dimensions. When you are interpolating from one orientation to another, this property of using Eulerangles causes the object to rotate in an unpredictable way. Instead of interpolating smoothly between two orientations, it will follow a strange arc because at some point two of the axes align which influences the motion. A visual explanation of this phenomenon can be found under sources (source 3)
I hope I have supplied you with enough information to understand rotations, as well as some practical examples you can copy into your own projects. As mentioned in the Introduction, I was really struggling with rotations, not knowing how to properly use them. While writing this article I gained a lot of knowledge on how you use rotations and I hope I have succeeded in passing some of that knowledge on. If you feel like you need some more information or maybe hear it in a different way, please check out the sources linked below.
Good luck with your own Unity endeavors! 🙂

This article is about stencil testing: a functionality you can use when writing shaders. It will discuss what the stencil buffer is, and gloss over some possible applications of the technique. It also contains some ideas that you might be able to execute using stencil testing.

I’ve often wondered what it means to practice game design.